热点资讯
其他资讯
双王街道新设备轮轴式ZPLE090-L2-40-S2-P2平行步进减速机
文章来源:ymcdkj
发布时间:2024-05-04 09:56:20
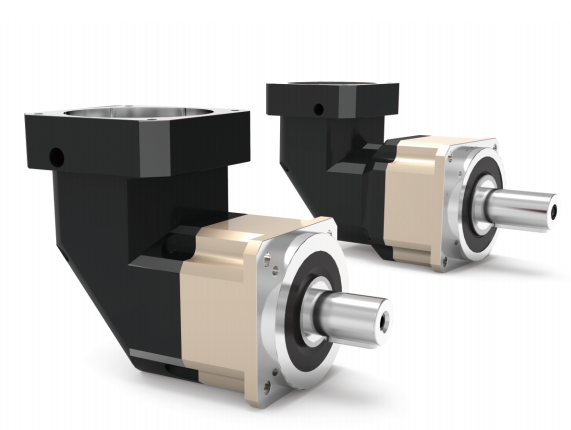
-S2-P2平行步进减速机
现代高速切削和自动化机床对具性能和稳定性提出了更高的要求,特别是涂层具在涂层前必须经过口的钝化,才能保证涂层的牢固性和使用寿命。具钝化的目的刃口钝化技术,其目的就是解决刃磨后的具刃口微观缺口的缺陷,使其锋值减少或消除,达到圆滑平整,既锋利坚固又耐用的目的。合理进行具钝化的益处刃口的圆化:去除刃口毛、达到一致的倒圆。刃口毛导致具磨损,工件的表面也会变得粗糙,经钝化后,刃口变得很光滑,极大减少崩刃,工件表面光洁度也会提高。
双王 2-P2平行步进减速机
行星减速机一般用于低转速大扭矩的传动设备,把电动机.内燃机或其它高速运转的动力通过行星减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的,普通的行星减速机也会有几对相同原理齿轮达到理想的减果,大小 齿轮的齿数之比,就是传动比。
双王街 -P2平行步进减速机
细分和相数没关系。以1.8度为例,原来一个脉冲走1.8度,现在改为4细分,那么现在一个脉冲只能走1.8/4度了。细分越多,每个脉冲的步进长度越短。细分的多少可由驱动器设置。 控制步进电机转多少 主要你得通过步进电机步距角度计算出电机转一圈需要多少脉冲,比如步距角度为0.9°则电机转一 冲,转半圈就是200个脉冲。步进电机驱动器你先了解下! 步进电机转速则通过改变脉冲频率来控制,用plc的pwm输出控制是比较方便的,速度的快慢不影响步进电机的行程,行程多少取决于脉冲数量。 注意一点步进电机速度越快转矩越小,请根据你的应用调节速度以防失步,造成走位不准确。 步进电机是接收步进驱动器给过来的脉冲信号,比如两相的步进,AB相分别轮流输出正反脉冲(按一定顺序),步进电机就可以运行了,相当于一定的脉冲步进马达对应走一定旋转角度。而PLC也可以发出脉冲,但脉冲电压不够,所以需要把PLC输出的脉冲给步进驱动器放大来驱动步进驱动器,相当于PLC的脉冲就是指令脉冲。一般PLC驱动步进时候有两路信号,一路是角度脉冲,另外一路是方向脉冲,PLC里边一般配所谓位移指令,发梯形脉冲给步进驱动器,这样可以缓冲启动带来的力冲击。
选购伺服减速机,要注意以下方面:
1、确认伺服减速机的精度能够满足您的控制要求。
2、确认负载额定扭矩要小于减速机额定输出扭矩。
3、伺服减速电机额定扭矩*减速比要大于负载额定扭矩。
4、选购伺服减速机的出力轴径不能大于表格上使用轴径。
5、负载通过伺服减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。
6、伺服减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机连接。
双王街 -P2平行步进减速机
100-P2-S2
在匀速圆周运动中,叫角速度。当匀速圆周运动正交为简谐振动时,角速度就转化为圆频率。(也有人把圆频率叫角频率的)显然,=2f(四式等价的公式3),(每秒全振动次数对应的角度)T=2(四式等价的公式2)(每个全振动对应的角度) ,定义每分钟全振动的次数为转速n,显然,n=6f(四式等价的公式4)T、、n这四个量中,知道一个,其它三个就是已知的,所以这四个互相转化的公式,叫四式等价。只要物体作周期性的往复运动,就是振动。